Discovery Q2 四轮全向平台
产品简介
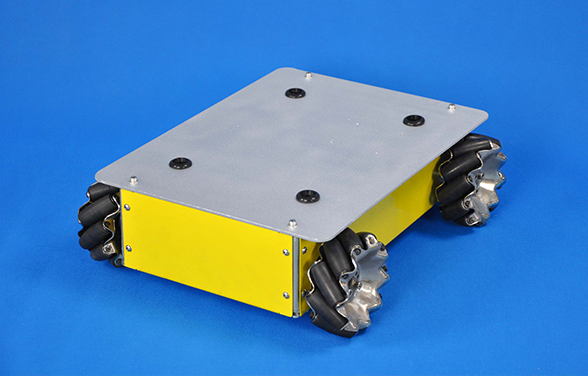
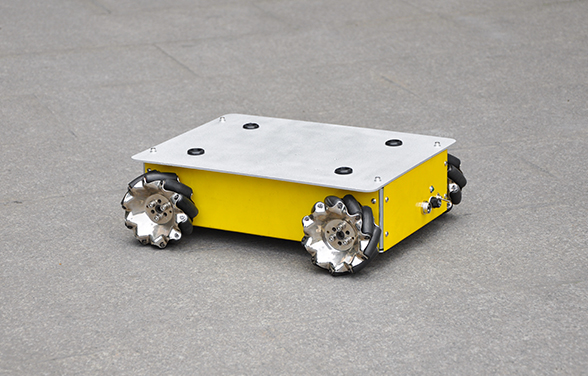
Discovery系列机器人平台,是经济型的小型机器人平台,旨在以高的性价比为客户提供一个完整、多接口、较高可靠性的移动机器人系统。Discovery Q2是四轮45度全向轮轮系的机器人平台,使用航发公司的QMA-10全向轮,与传统轮系相比,能够实现平移、自转、平移并自转等特殊运动。平台使用四台空心杯电机作为驱动,并配有多轴伺服驱动器,支持CAN总线及RS232接口。开发包向用户提供完整的设备通信协议以及基于STM32F407的示例与演示程序源码,使用户能够对Discovery Q2快速上手。
视频展示
产品特性
- 全方向自由移动
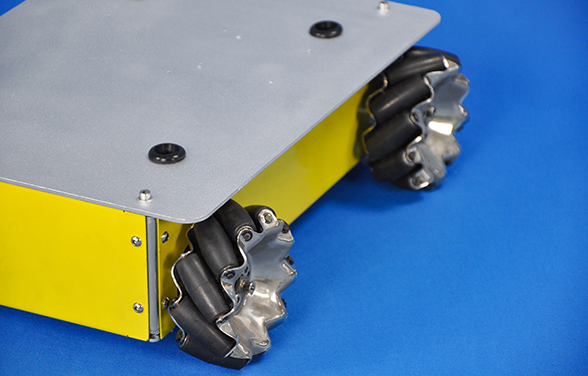
- 共轴摆式悬挂
- 轮系带轴承座设计
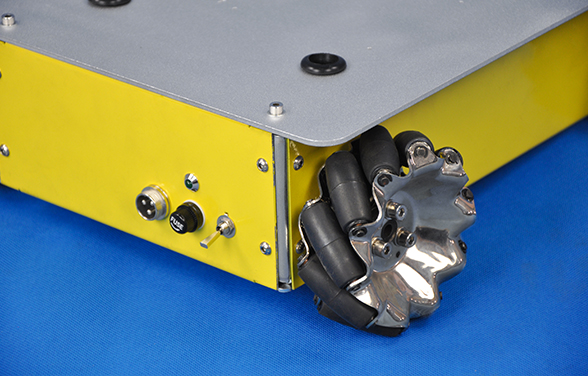
- 工业级全向轮
- 空心杯直流伺服电机
- 伺服驱动器
- DEMO开发板及应用代码
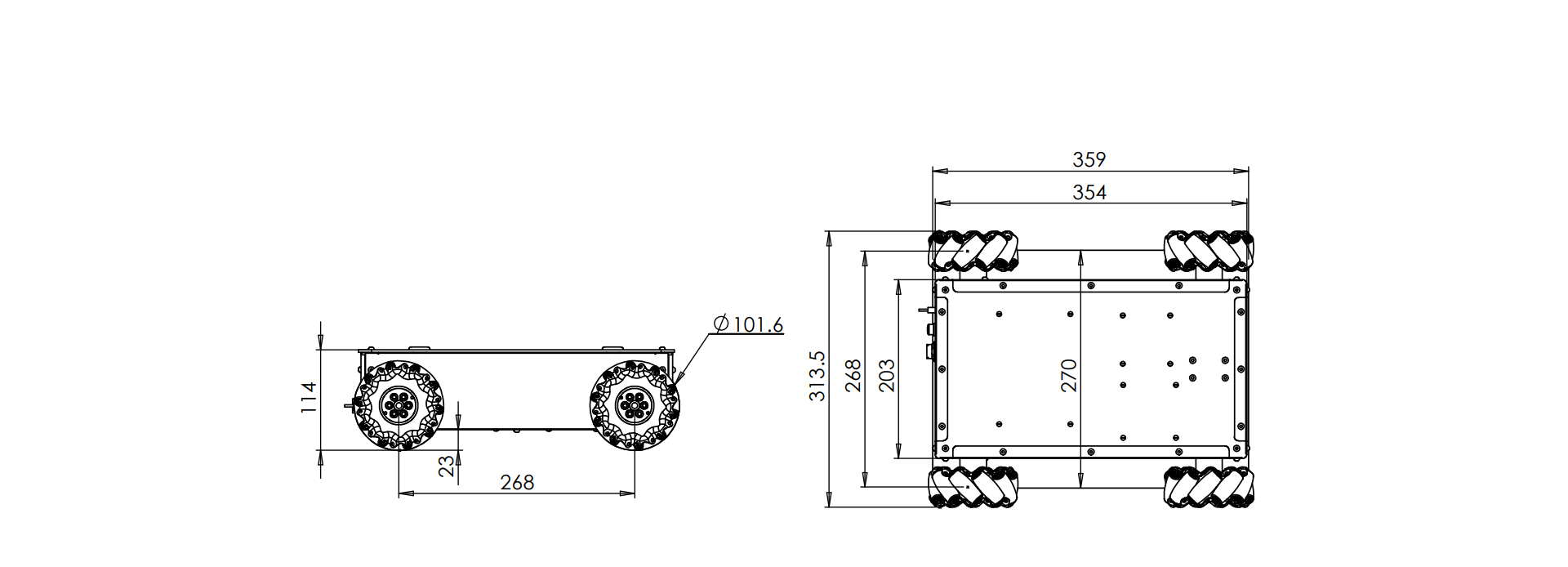
外形尺寸
规格参数
| 机身形式 | 钣金组合成型 | 外形尺寸 | 359×313.5×114mm |
| 驱动轮 | QMA-10全向轮 | 驱动轮直径 | 101.6mm |
| 驱动方式 | 四轮独立驱动 | 悬挂形式 | 共轴摆式悬挂 |
| 车身最小离地间隙 | 23mm | 整机重量 | 6.7kg |
| 额定负载能力 | 10kg | 电机类型 | 空心杯直流伺服电机 |
| 电机额定功率 | 17W | 电机编码器 | 12线/转,A、B相输出 |
| 电机数量 | 4 | 电机驱动 | 伺服驱动器,CAN总线、RS232通信接口 |
| 最大移动速度 | 0.65m/s | 最大自转速度 | 140°/s |
| 最小转弯半径 | 0m | 适应的地形 | 室内、室外坑陷较少的水泥及沥青路面 |
| 典型续航时间 | 约10h(负载5kg,运行速度0.5m/s,运行率70%) | 待机时间 | >30h |
| 车载电源输出 | 5V@2.5A×2路 /电池电压(9.6~12.6V)@>5A | 电源保险管预设规格 | 5×20/10A |
| 电池 | 12V/10.4Ah锂离子电池 | 电池快速更换 | 支持 |
| 充电器 | 输入:AC220V~240V / 充电电流:3A / 接口:直插式 | 附件 | 电池充电器、ULB-1超声传感器×3 |
| DEMO开发板 | RHF407开发板(CAN×2,RS232×2,TTL×1,RS485×1,SPI×1,I2C×1,ADC×8,DAC×2,PWM×8,LED×2,按键×2, 独立I/O×24,可复用I/O×29,TF卡接口×1,RTC后备电池座,可复用TFT LCD接口×1) | ||
| 机身形式 | 钣金组合成型 | ||
| 驱动轮 | QMA-10全向轮 | ||
| 驱动方式 | 四轮独立驱动 | ||
| 车身最小离地间隙 | 23mm | ||
| 额定负载能力 | 10kg | ||
| 电机额定功率 | 17W | ||
| 电机数量 | 4 | ||
| 最大移动速度 | 0.65m/s | ||
| 最小转弯半径 | 0m | ||
| 典型续航时间 | 约10h(负载5kg,运行速度0.5m/s,运行率70%) | ||
| 车载电源输出 | 5V@2.5A×2路 /电池电压(9.6~12.6V)@>5A | ||
| 电池 | 12V/10.4Ah锂离子电池 | ||
| 充电器 | 输入:AC220V~240V / 充电电流:3A / 接口:直插式 | ||
| 外形尺寸 | 359×313.5×114mm | ||
| 驱动轮直径 | 101.6mm | ||
| 悬挂形式 | 共轴摆式悬挂 | ||
| 整机重量 | 6.7kg | ||
| 电机类型 | 空心杯直流伺服电机 | ||
| 电机编码器 | 12线/转,A、B相输出 | ||
| 电机驱动 | 伺服驱动器,CAN总线、RS232通信接口 | ||
| 最大自转速度 | 140°/s | ||
| 适应的地形 | 室内、室外坑陷较少的水泥及沥青路面 | ||
| 待机时间 | >30h | ||
| 电源保险管预设规格 | 5×20/10A | ||
| 电池快速更换 | 支持 | ||
| 附件 | 电池充电器、ULB-1超声传感器×3 | ||
| DEMO开发板 | RHF407开发板(CAN×2,RS232×2,TTL×1,RS485×1,SPI×1,I2C×1,ADC×8,DAC×2,PWM×8,LED×2,按键×2, 独立I/O×24,可复用I/O×29,TF卡接口×1,RTC后备电池座,可复用TFT LCD接口×1) | ||
典型部件
-

QL-10全向轮
-

Faulhaber3242空心杯直流伺服电机
-

IMDR4E伺服驱动器
-

ULB-1超声测距传感器
-

RHF407开发板
典型研究与应用领域
- 模式识别技术研究
- 电子工程实验
- 搬运与仓储应用
- 路径规划技术研究
- 机械工程实验
- 监控与侦查应用
- 自动驾驶技术研究
- 嵌入式系统开发与实验
- 机器人竞赛
- 传感器技术研究
- 图像处理技术研究
- 地图绘制应用
- 人工智能技术研究
- 多机器人合作技术研究
- 柔性制造系统应用
可选附件
- HMC-01遥控手柄
- LPC-16巡线传感器
- ULB-1超声测距传感器
- 激光雷达
- GPS定位器
- Kinect体感传感器