Navigator Q2 Четырёхколёсная всенаправленная платформа
Краткое описание продукта
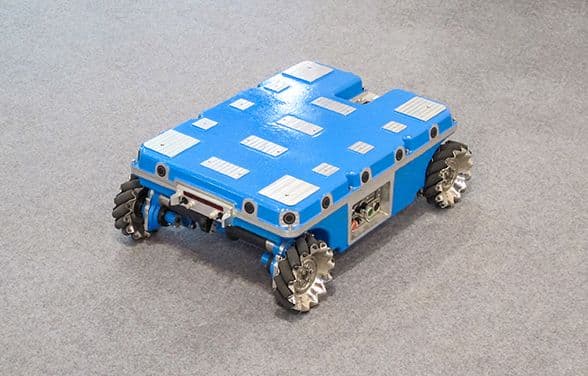
Роботизированные платформы серии Navigator представляют собой образец высокой производительности и надёжности. Разработанные в соответствии с концепцией промышленного оборудования, эти платформы предлагают пользователю законченную роботизированную систему, отличающуюся высокой производительностью, высокой надёжностью, богатым набором интерфейсов, простотой использования, строгим уровнем защиты и способностью к длительной непрерывной работе. Navigator Q2 — это роботизированная платформа с четырьмя колёсами на 45-градусных всенаправленных колёсах, использующая всенаправленные колёса QMA-15 производства компании Hangfa. По сравнению с традиционными колёсными системами, она способна выполнять такие особые движения, как поступательное перемещение, вращение на месте, а также одновременное поступательное перемещение и вращение. Шасси платформы изготовлено методом литья из цельного алюминиевого сплава и оснащено гидравлической амортизационной подвеской. В качестве привода используются четыре мощных бесколлекторных двигателя (空心杯电机) с отдельными сервоприводами. Высокоуровневый контроллер движения интегрирует множество функций управления движением и поддерживает интерфейсы CAN bus и RS232. Пакет разработчика предоставляет пользователю полный протокол связи устройства, а также исходные коды примеров и демонстрационных программ на базе микроконтроллера STM32F407, что позволяет быстро освоить работу с Navigator Q2.



Видеообзор
Характеристики
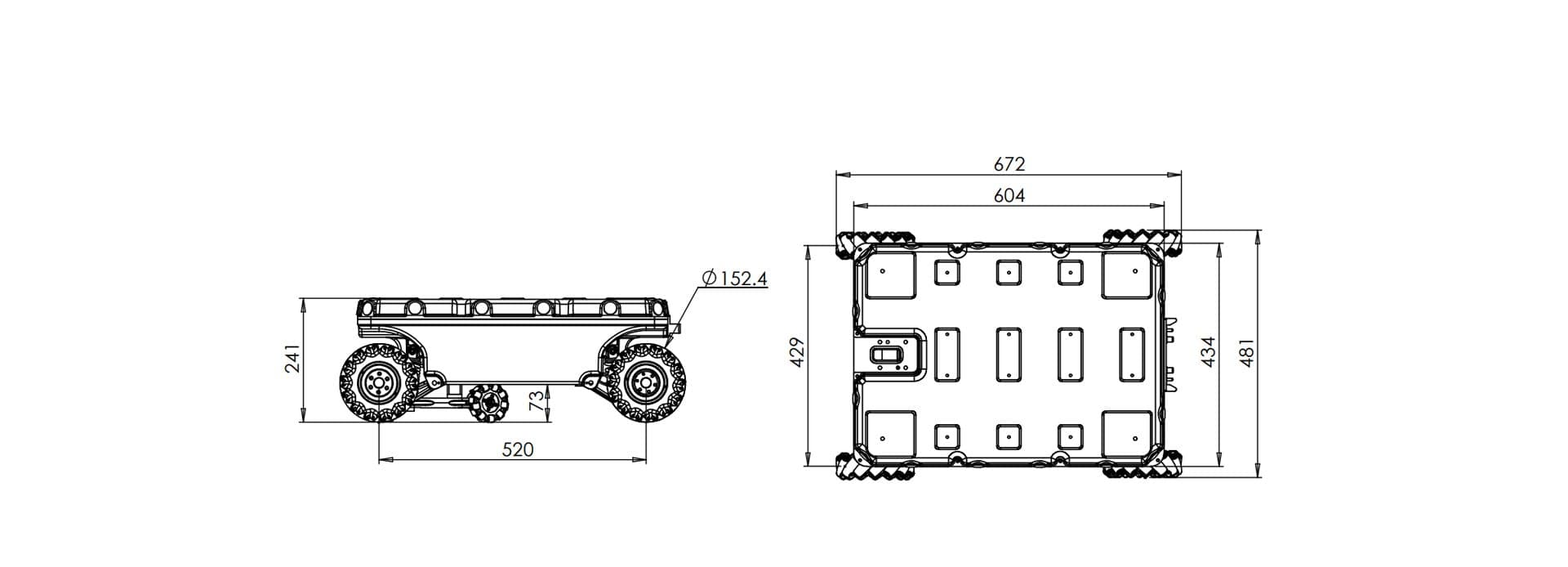
Внешние размеры
Параметры моделей
| Тип корпуса | Цельный алюминиевый сплав | Внешние размеры (Д×Ш×В) | 672 × 481 × 241 мм |
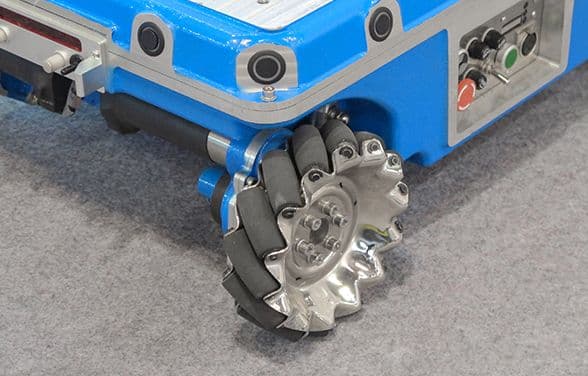
| Приводные колёса | Всенаправленные колёса QMA-15 | Диаметр приводного колеса | 152,4 мм |
| Способ привода | Четыре независимых привода | Тип подвески | Гидравлическая амортизационная подвеска |
| Минимальный дорожный просвет | 73 мм | Полная масса | 32 кг |
| Номинальная грузоподъёмность | 50 кг | Тип двигателя | Бесколлекторный серводвигатель постоянного тока |
| Номинальная мощность двигателя | 90 Вт | Энкодер двигателя | 500 линий/оборот, выход A и B |
| Количество двигателей | 4 | Привод двигателя | Сервопривод, интерфейсы связи CAN bus, RS232 |
| Максимальная скорость движения | 1,2 м/с | Максимальная скорость вращения | 145 °/с |
| 0 m Минимальный радиус поворота | 0 м | Адаптируемый рельеф | В помещениях, снаружи на цементных и асфальтовых дорогах с небольшим количеством выбоин |
| иповое время автономной работы | Около 10 ч (при нагрузке 10 кг, скорости движения 1 м/с, рабочем цикле 70 %) | Время в режиме ожидания | >30 ч |
| Выходная мощность на борту | 5 В @ 5 А / 12 В @ 5 А / Напряжение батареи (22,4–29,2 В) @ >10 А | Предохранитель блока питания | 5×20 / 20 А |
| Аккумулятор | Литий-ионный, 24 В / 18,2 А·ч | Быстрая замена аккумулятора | Есть |
| Зарядное устройство | Вход: AC 220–240 В / Ток зарядки: 5 А / Разъём: штекерный | Комплект поставки | Зарядное устройство для аккумулятора |
| DEMO-плата Плата разработки | RHF407 (CAN ×2, RS232 ×2, TTL ×1, RS485 ×1, SPI ×1, I²C ×1, ADC ×8, DAC ×2, ШИМ ×8, СИД ×2, кнопка ×2, отдельные I/O ×24, мультиплексируемые I/O ×29, интерфейс TF-карты ×1, отсек для резервной батареи RTC, мультиплексируемый интерфейс TFT LCD ×1) | ||
| Тип корпуса | Цельный алюминиевый сплав |
| Приводные колёса | Всенаправленные колёса QMA-15 |
| Способ привода | Четыре независимых привода |
| Минимальный дорожный просвет | 73 мм |
| Номинальная грузоподъёмность | 50 кг |
| Номинальная мощность двигателя | 90 Вт |
| Количество двигателей | 4 |
| Максимальная скорость движения | 1,2 м/с |
| 0 m Минимальный радиус поворота | 0 м |
| иповое время автономной работы | Около 10 ч (при нагрузке 10 кг, скорости движения 1 м/с, рабочем цикле 70 %) |
| Выходная мощность на борту | 5 В @ 5 А / 12 В @ 5 А / Напряжение батареи (22,4–29,2 В) @ >10 А |
| Аккумулятор | Литий-ионный, 24 В / 18,2 А·ч |
| Зарядное устройство | Вход: AC 220–240 В / Ток зарядки: 5 А / Разъём: штекерный |
| Внешние размеры (Д×Ш×В) | 672 × 481 × 241 мм |
| Диаметр приводного колеса | 152,4 мм |
| Тип подвески | Гидравлическая амортизационная подвеска |
| Полная масса | 32 кг |
| Тип двигателя | Бесколлекторный серводвигатель постоянного тока |
| Энкодер двигателя | 500 линий/оборот, выход A и B |
| Привод двигателя | Сервопривод, интерфейсы связи CAN bus, RS232 |
| Максимальная скорость вращения | 145 °/с |
| Адаптируемый рельеф | В помещениях, снаружи на цементных и асфальтовых дорогах с небольшим количеством выбоин |
| Время в режиме ожидания | >30 ч |
| Предохранитель блока питания | 5×20 / 20 А |
| Быстрая замена аккумулятора | Есть |
| Комплект поставки | Зарядное устройство для аккумулятора |
| DEMO-плата Плата разработки | RHF407 (CAN ×2, RS232 ×2, TTL ×1, RS485 ×1, SPI ×1, I²C ×1, ADC ×8, DAC ×2, ШИМ ×8, СИД ×2, кнопка ×2, отдельные I/O ×24, мультиплексируемые I/O ×29, интерфейс TF-карты ×1, отсек для резервной батареи RTC, мультиплексируемый интерфейс TFT LCD ×1) |
Типовые компоненты




Типичные области исследований и применения
Опциональные аксессуары

Если у вас есть какие-либо вопросы или потребности, касающиеся продукции Hangfa Robotics или других смежных тем, вы можете связаться с нами по горячей линии или оставить онлайн-сообщение. Мы будем рады предоставить вам качественное обслуживание.
Горячая линия: +86 183 8206 6165
Оставить заявку >